Damped Oscillator
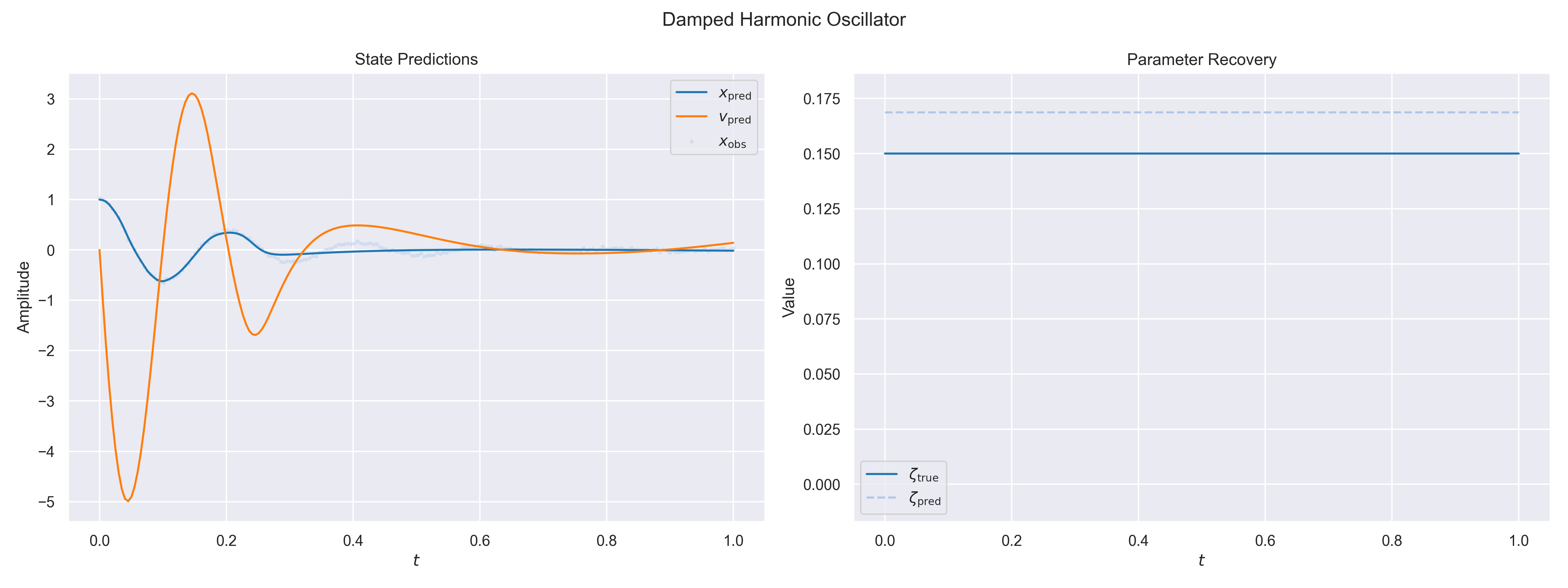
Harmonic oscillator with damping. Recovers damping ratio \(\zeta\) from displacement observations.
Background
The damped harmonic oscillator is a fundamental model in mechanics, electrical engineering, and control theory. It describes a system subject to a restoring force proportional to displacement and a dissipative force proportional to velocity. The damping ratio \(\zeta\) classifies the response into three regimes: underdamped (\(\zeta < 1\), oscillatory decay), critically damped (\(\zeta = 1\), fastest non-oscillatory return), and overdamped (\(\zeta > 1\), sluggish return). The template uses an underdamped configuration (\(\zeta = 0.15\)).
Governing Equations
Second-order ODE with learnable damping ratio \(\zeta\):
Equivalently, as a first-order system with velocity \(v = \dot{x}\):
where:
- \(x(t)\): displacement
- \(v(t)\): velocity
- \(\omega_0\): natural frequency (known)
- \(\zeta\): damping ratio (to recover)
Default Configuration
The generated template uses the following values.
Parameters to recover:
| Symbol | Code constant | True value |
|---|---|---|
| \(\zeta\) | TRUE_ZETA |
\(0.15\) |
Known constants:
| Symbol | Code constant | Value |
|---|---|---|
| \(\omega_0\) | TRUE_OMEGA0 |
\(2\pi \approx 6.283\) |
Initial conditions: \(x(0) = 1.0, \quad \dot{x}(0) = 0.0\)
Domain: \(t \in [0, 5]\) s
Features Demonstrated
- Second-order ODE support via
ODEProperties.order - Native higher-order initial condition enforcement (
ODEProperties.dy0) - Scalar
Parameterrecovery
Results